Bernhard Jaeger
I am a PhD student at the University of Tübingen, where I am part of the Autonomous Vision Group led by Prof. Andreas Geiger. My research is supported by the International Max Plank Research School for Intelligent Systems.
Research:
My goal is to solve autonomous driving, which I view as an embodied intelligence problem.
My research has contributed to the development of end-to-end driving technology, which by now is being widely adopted by leading industry players like Waymo, Tesla, or NVIDIA.
I worked on the TransFuser series of models, which is a widely used baseline in the literature. Our survey, "End-to-end autonomous driving: Challenges and frontiers" is the most cited introductory text in the field of end-to-end driving.
Recently I have been working on reinforcement learning (RL) techniques for training planning policies.
Our method, CaRL is the first open-source RL policy that outperformed the leading imitation learning methods on the nuPlan benchmark.
I am committed to open contribution to the community. All my papers are freely available on arXiv, and all my code is available on GitHub.
Currently, I am building a non-profit research organization to solve and open-source the science behind level 5 driving. We are hiring. Email me if you are interested.
Bio: I studied B.Sc. Informatics: Games Engineering at the Technical University of Munich. Following that I worked for 1 year as a software developer at FERCHAU as graphics developer. Afterwards I did a M.Sc. in Computer Science at the University of Tübingen. I started my PhD at the Autonomous Vision Group in April 2022.

Publications
Long Nguyen, Micha Fauth, Bernhard Jaeger, Daniel Dauner, Maximilian Igl, Andreas Geiger, Kashyap Chitta
Conference on Computer Vision and Pattern Recognition (CVPR), 2026
Abs / Paper / Code /
@InProceedings{Nguyen2026CVPR,
author = {Long Nguyen and Micha Fauth and Bernhard Jaeger and Daniel Dauner and Maximilian Igl and Andreas Geiger and Kashyap Chitta},
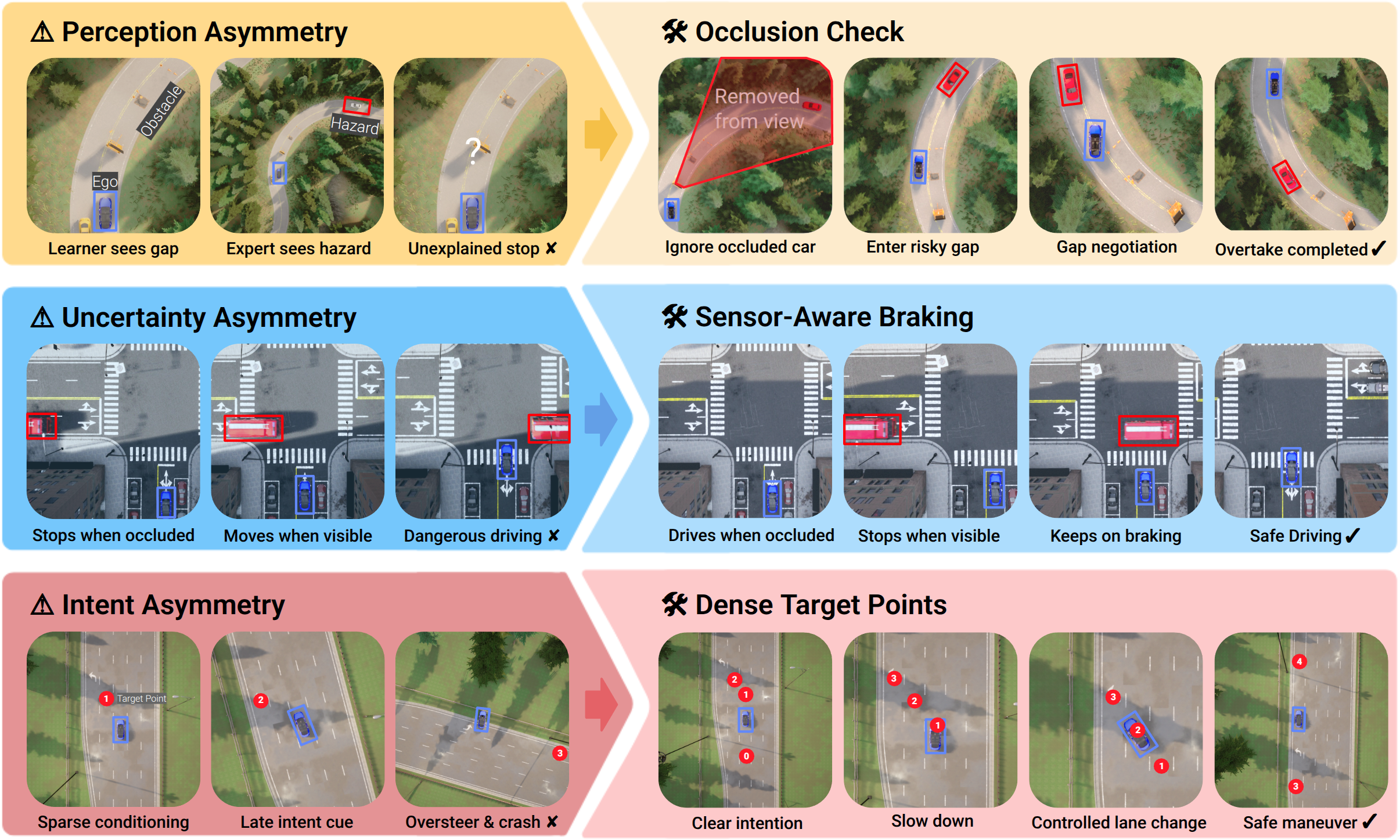
title = {LEAD: Minimizing Learner-Expert Asymmetry in End-to-End Driving},
booktitle = {Conference on Computer Vision and Pattern Recognition (CVPR)},
year = {2026},
}
Bernhard Jaeger, Daniel Dauner, Jens Beißwenger, Simon Gerstenecker, Kashyap Chitta, Andreas Geiger
Proc. of the Conf. on Robot Learning (CoRL), 2025
Abs / Paper / Code /
@InProceedings{Jaeger2025CoRL,
author = {Bernhard Jaeger and Daniel Dauner and Jens Beißwenger and Simon Gerstenecker and Kashyap Chitta and Andreas Geiger},
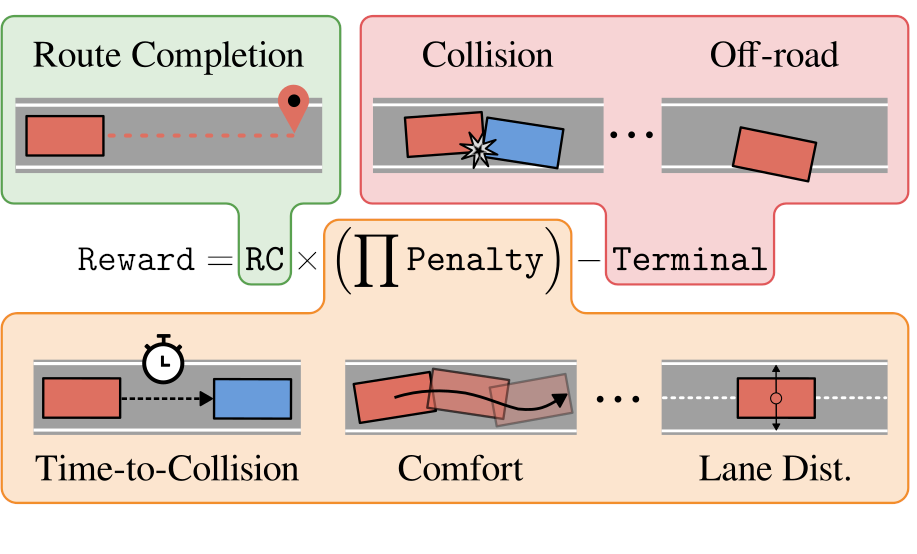
title = {CaRL: Learning Scalable Planning Policies with Simple Rewards},
booktitle = {Proc. of the Conf. on Robot Learning (CoRL)},
year = {2025},
}
Bernhard Jaeger, Andreas Geiger
Foundations and Trends® in Optimization, 2024
Abs / Paper /
@article{Jaeger2024FTO,
author = {Bernhard Jaeger and Andreas Geiger},
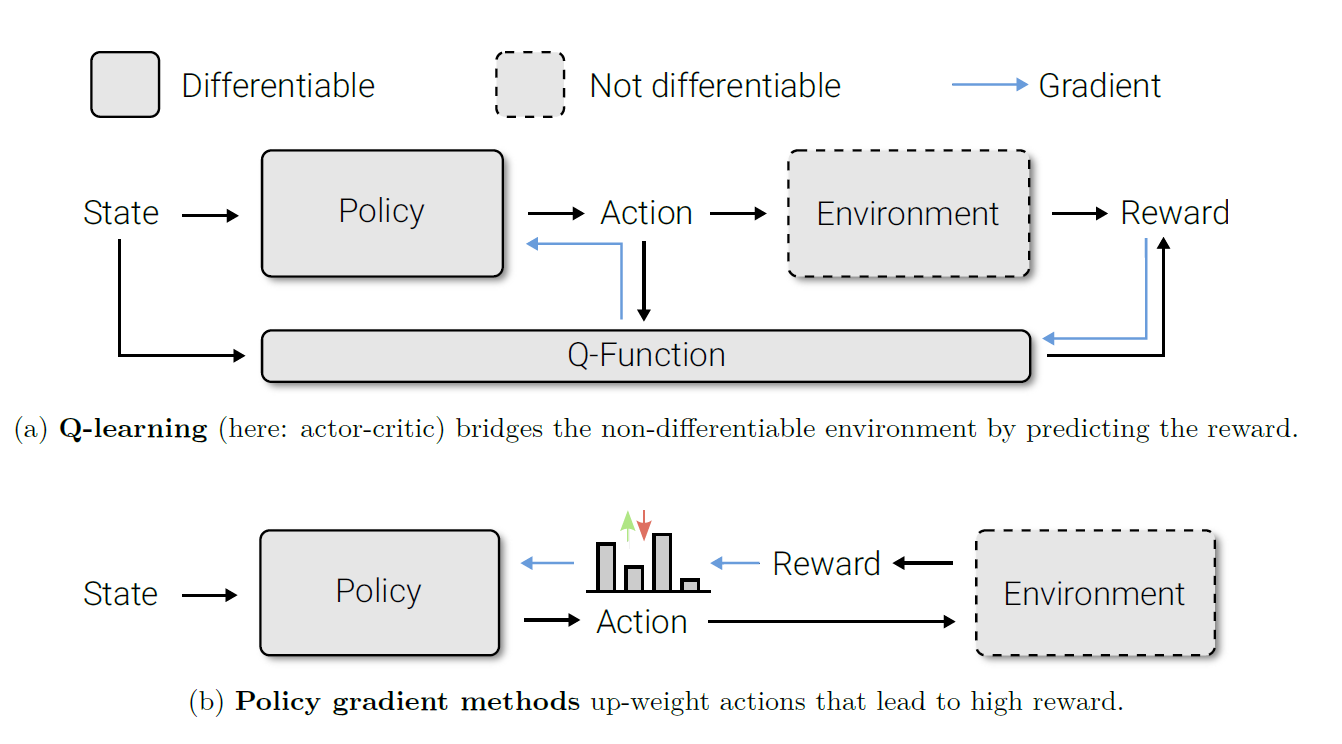
title = {An Invitation to Deep Reinforcement Learning},
year = {2024},
journal = {Foundations and Trends® in Optimization},
}
Li Chen, Penghao Wu, Kashyap Chitta, Bernhard Jaeger, Andreas Geiger, Hongyang Li
Transactions on Pattern Analysis and Machine Intelligence (T-PAMI), 2024
Abs / Paper / Code /
@article{Chen2024PAMI,
author = {Li Chen and Penghao Wu and Kashyap Chitta and Bernhard Jaeger and Andreas Geiger and Hongyang Li},
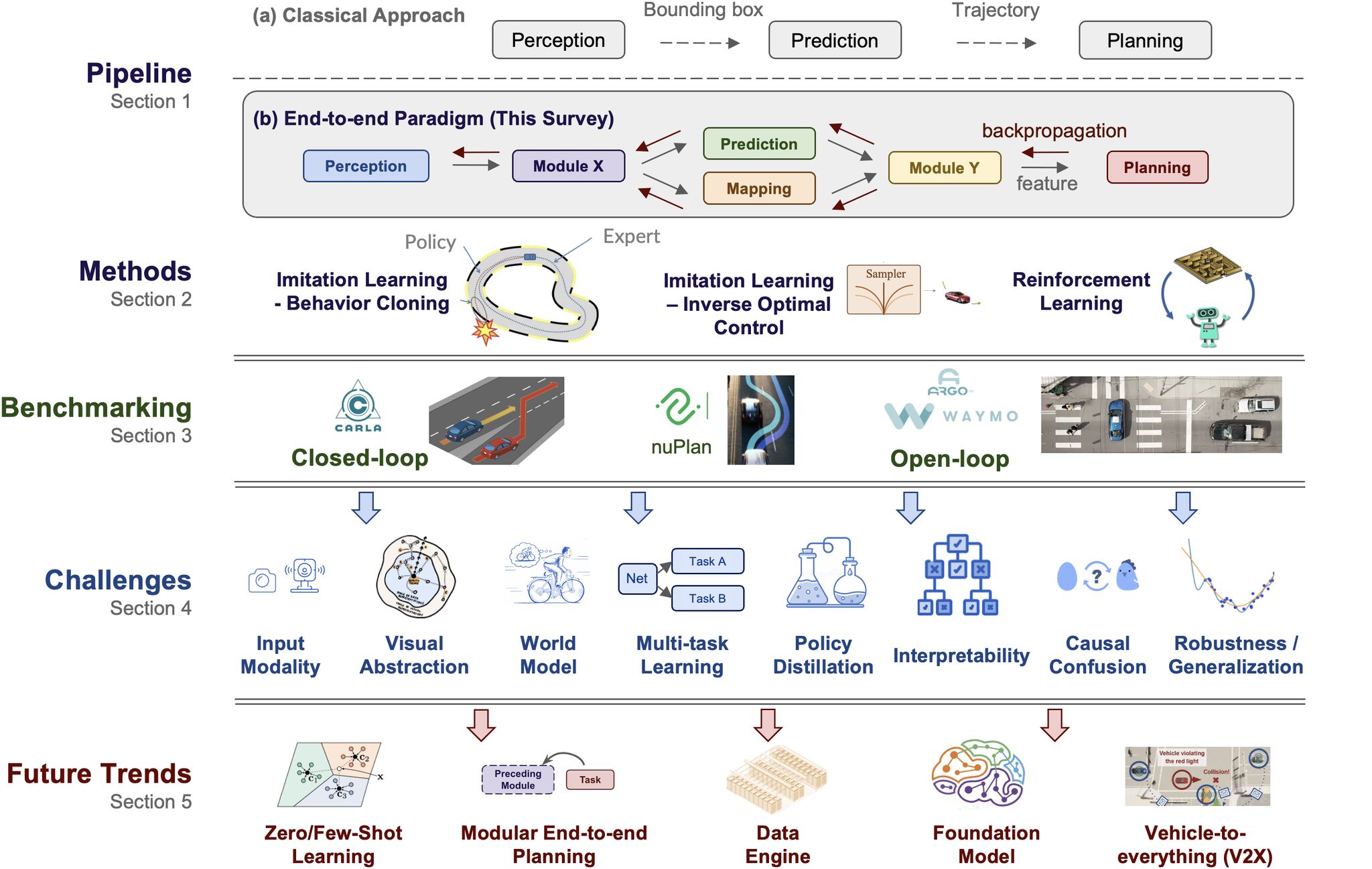
title = {End-to-end Autonomous Driving: Challenges and Frontiers},
year = {2024},
journal = {Transactions on Pattern Analysis and Machine Intelligence (T-PAMI)},
}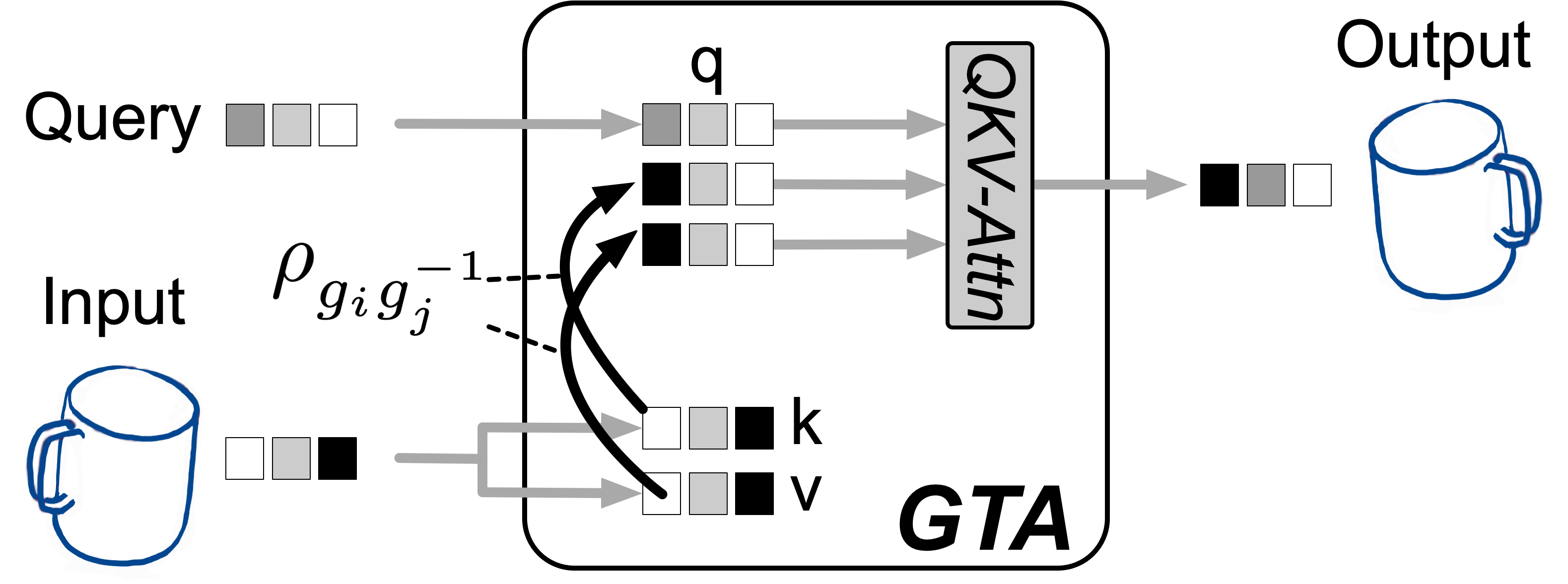
Takeru Miyato, Bernhard Jaeger, Max Welling, Andreas Geiger
Proc. of the International Conf. on Learning Representations (ICLR), 2024
Abs / Paper / Code / Website /
@InProceedings{Miyato2024ICLR,
author = {Takeru Miyato and Bernhard Jaeger and Max Welling and Andreas Geiger},
title = {GTA: A Geometry-Aware Attention Mechanism for Multi-View Transformers},
booktitle = {Proc. of the International Conf. on Learning Representations (ICLR)},
year = {2024},
}
Bernhard Jaeger, Kashyap Chitta, Andreas Geiger
Proc. of the IEEE International Conf. on Computer Vision (ICCV), 2023
Abs / Paper / Video / Poster / Code /
@InProceedings{Jaeger2023ICCV,
author = {Bernhard Jaeger and Kashyap Chitta and Andreas Geiger},
title = {Hidden Biases of End-to-End Driving Models},
booktitle = {Proc. of the IEEE International Conf. on Computer Vision (ICCV)},
year = {2023},
}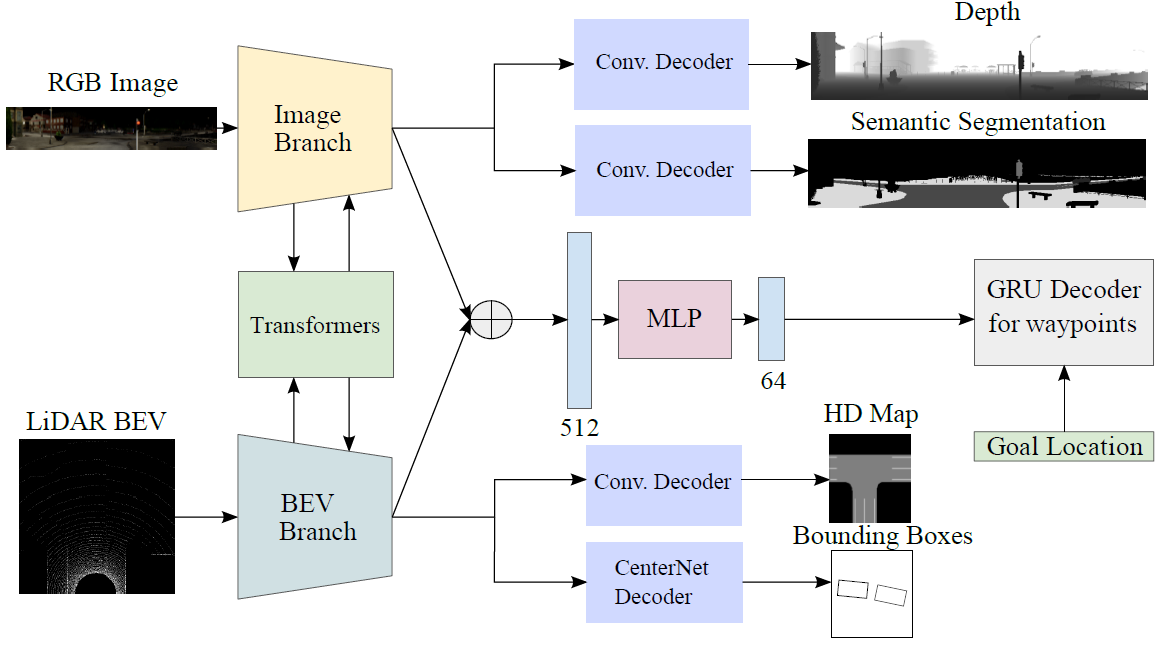
Kashyap Chitta, Aditya Prakash, Bernhard Jaeger, Zehao Yu, Katrin Renz, Andreas Geiger
Transactions on Pattern Analysis and Machine Intelligence (T-PAMI), 2023
Abs / Paper / Supplemental / Video / Poster / Code /
@article{Chitta2023PAMI,
author = {Kashyap Chitta and Aditya Prakash and Bernhard Jaeger and Zehao Yu and Katrin Renz and Andreas Geiger},
title = {TransFuser: Imitation with Transformer-Based Sensor Fusion for Autonomous Driving},
year = {2023},
journal = {Transactions on Pattern Analysis and Machine Intelligence (T-PAMI)},
}
Bernhard Jaeger
University of Tübingen, 2021
Paper /
@mastersthesis{Jaeger2021Thesis,
author = {Bernhard Jaeger},
title = {Expert Drivers for Autonomous Driving},
year = {2021},
school = {University of Tübingen},
}Talks
Machine Learning for Autonomous Driving Workshop - NeurIPS, 2022
Other activities
- One concern that I have as an AI researcher when publishing code is that it can potentially be used in dual-use applications. To solve this, I developed the Civil Software Licenses, which prevent dual-use of open-source software while being minimal in the restrictions they impose.
- I am a proponent of rigorous experimental evaluation in autonomous driving research and wrote a guide about common mistakes in the community to help people avoid common pitfalls.
- The TransFuser series of models is in version 6 already. I have created a history document for people to have an easier overview.
News
| Oct 26, 2026 | I was selected as Top Reviewer at NeurIPS 2025. |
| Jul 01, 2025 | The Vector Stiftung (foundation) supports my research with a grant of 91600 € for the project "Skalierung von verstärkendem Lernen für Ende-zu-Ende Methoden für autonomes Fahren". The grant was competitive, with a 5% acceptance rate (15/300). |
| Jun 11, 2025 | Our team placed 2nd in the Waymo Vision-based End-to-End Driving Challenge held at the CVPR 2025 Workshop on Autonomous Driving. |
| Jun 11, 2025 | Our team placed 3rd in the Scenario Generation Challenge held at the CVPR 2025 Workshop on Autonomous Driving. |
| Jun 17, 2024 | Our team placed 2nd in the CARLA Challenge held at the CVPR 2024 Workshop Foundation Models for Autonomous Systems |
| Dec 14, 2023 | Our team placed 2nd in the CARLA Sensor Track challenge held at the Machine Learning for Autonomous Driving Symposium in New Orleans. |
| Nov 21, 2022 | Our team won the CARLA leaderboard MAP Track challenge at the NeurIPS 2022 Machine Learning for Autonomous Driving workshop. |
| Apr 01, 2022 | I joined the University of Tübingen as a PhD student. |
| Nov 22, 2021 | Our team placed 2nd in the NeurIPS 2021 CARLA Machine Learning for Autonomous Driving autonomous driving challenge . |
Website template provided by Michael Niemeyer.
⚛
⚛